


Con esta guía vamos a ver como pasar a Betaflight el firmware del Kingkong Q100 o Hobbymate Q100 de una forma muy rápida, sencilla y eficaz.
Veréis que la mejora es sustancial, enorme diría yo respecto al firmware original, un Cleanflight. Notaremos como este micro drone vuela de modo muy estable y noble una vez lo actualicemos. Total y absolutamente recomendable hacerle esta actualización al Q100.
Vais a disfrutar como cosacos cuando lo tengáis actualizado y afinado a gusto de cada uno, claro está.
Pues vamos a ello. Va a ser una guía eminentemente visual, a base de capturas de pantalla para que no os perdáis.
Instalando el plugin Betaflight en el navegador Google Chrome
Pues si, necesitamos el navegador Google Chorme para poderlo hacer. Tanto Betaflight como Cleanflight, iNav, Raceflight …. son plugin’s que corren en Google Chrome.
Pues primer paso, si es que no tenéis ya instalado el Google Chrome va a ser instalarlo. Una vez hecho esto abriremos el navegador y nos iremos a los tres puntitos verticales que aparecen en el lado derecho de la barra de direcciones y pulsamos con el ratón.
Buscamos en el menú “configuración”, pulsamos. En la columna de la izquierda seleccionamos “extensiones”. Bajamos hasta el final de la ventana a buscar “Obtener más extensiones” y lo seleccionamos.
Ahora en la columna de la izquierda nos aparece una barra de búsqueda, escribimos “betaflight” y pulsamos enter.
Nos aparece en primer lugar “Betaflight Configurator”, pulsamos en el botón “Añadir a Chrome”.
Felicidades!! ya tienes instalada la extensión Betaflight!! Para entrar en ella solo queda pulsar en el acceso directo a “Aplicaciones” que aparece debajo de la barra de direcciones en el navegador.
Saldrá una pantalla como esta:
Pantalla de inicio de Betaflight
Seleccionado el firmware para nuestra controladora de vuelo
Ahora toca buscar el fichero correspondiente al firmware de nuestra controladora de vuelo. Para ello si os fijáis, en esta pantalla en la columna de la izquierda hay tres iconos, el último es un “chip”, seleccionamos este y procedemos de la siguiente manera:
- En el primer desplegable seleccionamos “ALIENFLIGHTF1”
- En el segundo desplegable seleccionamos la versión del firmware … “3.1.7 – ALIENFLIGHTF1 – 10-04-2017 …”
- Activamos el botón “No reboot sequence”
- Ahora activamos “Flash on connect”
- Activamos “Full chip erase” importante si no queremos que nos haga extraños al pasar de un firmware a otro.
- Dejamos los otros dos botones sin activar
- Bajamos al final de la ventana y le damos al botón de “Load Firmware [Online]”, esto nos descargará el fichero.
Os dejo la captura de pantalla correspondiente:
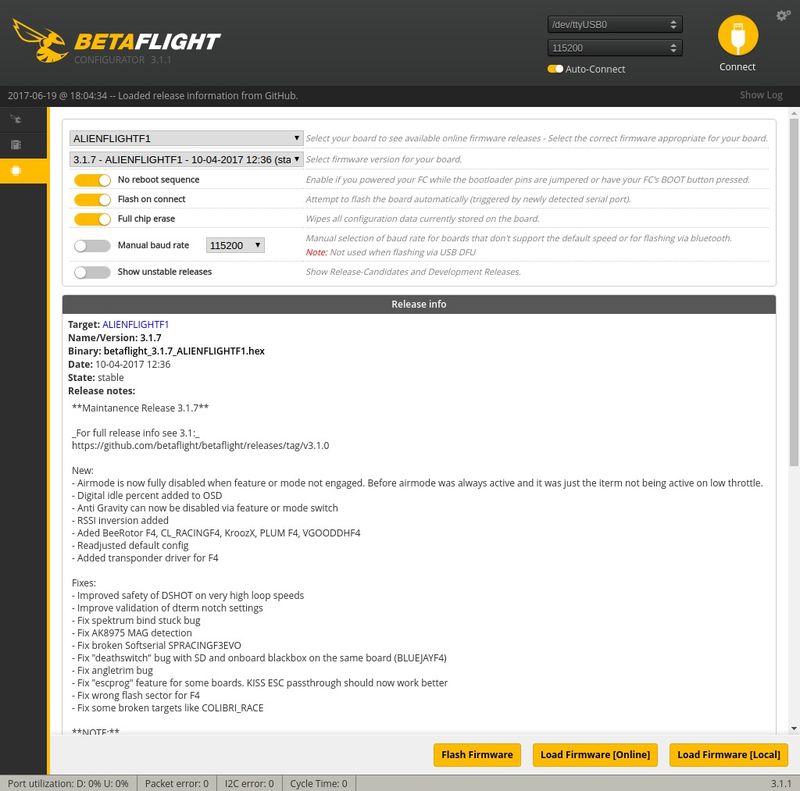
Actualizando firmware Betaflight
Bien, la cosa va viento en popa, ahora os explico que hay que hacer con el Q100 por pasos.
- NOOOO!!! aún no conectes el cable de USB!!! Bueno si quieres el extremo que va en el ordenador vale, ese si puedes, pero el micro-usb a la controladora aún no.
- Si os fijáis en el Q100 justo en la abertura del lado izquierdo del capó, jejeje, se puede apreciar un pequeño botón pulsador. Bien, esto es fundamental, hay que pulsar este botón con la uña y sin soltarlo hay que conectar, ahora si, el micro-usb a la controladora de vuelo. Una vez conectado el cable podéis soltar el pulsador.
Os dejo una imagen del pulsador:

Bootloader Q100
Actualizando el firmware Betaflight en el Q100
Pues una vez pulsado y conectado el cable ocurre que el Betaflight se pone en modo flasheo de forma automática, y veréis algo así:
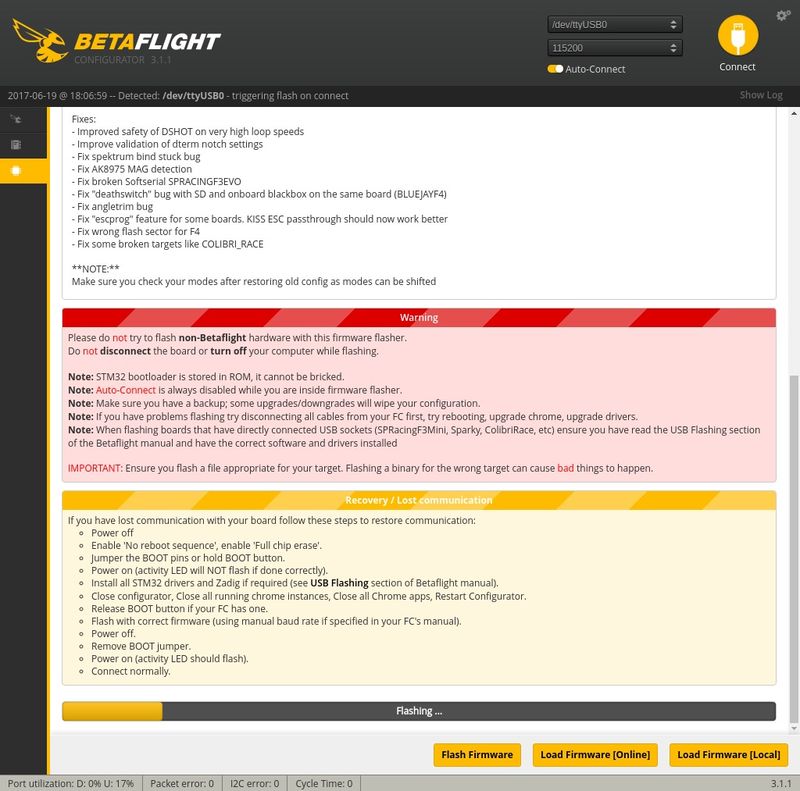
Flasheando Betaflight en Q100
Que barbaridad!! sois unos Cracks!! ya lo tenéis casi todo hecho!!
Queda decir que una vez hayamos concluido el proceso de carga del nuevo firmware es bueno desconectar el micro drone Q100 del cable usb. Dejadlo un minuto descansar y volved a conectar ahora si para configurarlo.
Os voy a dejar unas cuantas capturas de pantalla con las configuraciones que yo le tengo hechas al Kingkong Q100, y también unos enlaces de descarga de los ficheros de backup de configuración y del volcado de CLI …. Y alguno dirá que carajos será eso…
Lo vemos más adelante.
Vamos a configurar Betaflight en el Kingkong Q100
Conectamos el cable USB y le damos al botón “Connect” en la parte superior derecha de la pantalla, aparecerá:
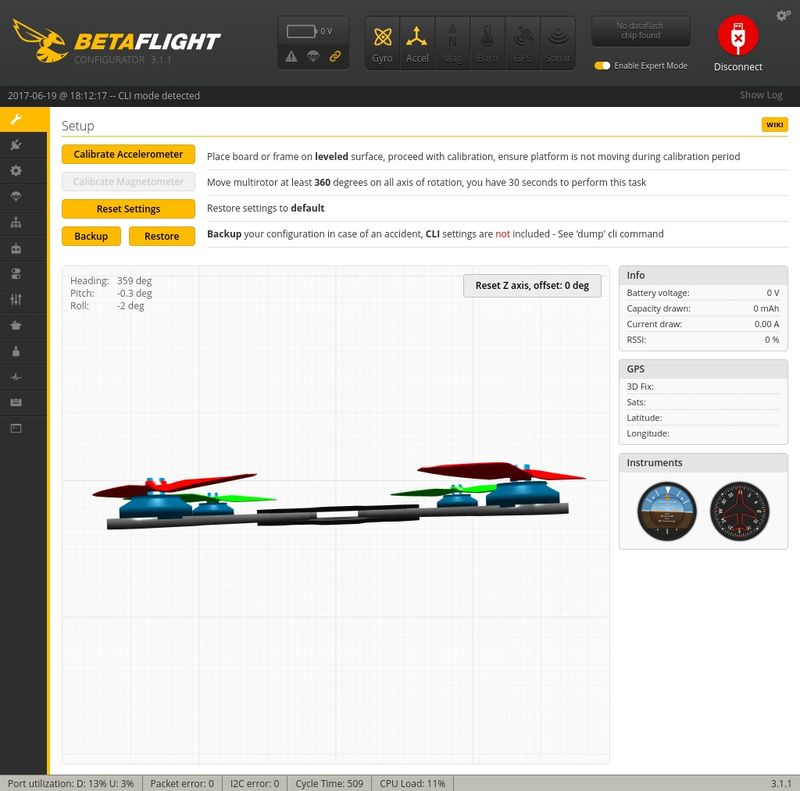
Setup Betaflight Q100
Aquí si observáis bien hay un botón que indica “Calibrate Accelerometer”, estando el micro drone en la mesa en posición estable y horizontal lo pulsamos para calibrar la posición horizontal del drone.
Luego veréis que hay dos botones más, “Backup” y “Restore”. Bien el primero sirve para una vez que tenemos todo bien ajustado y bonito hacer una copia, un backup, de la configuración.
El segundo, “Restore”, para leer la configuración desde un archivo y cargarla de nuevo en nuestra controladora. Yo os dejaré al final del artículo un enlace a mi archivo de “Backup” por si lo queréis descargar y utilizar para vuestra controladora.
Hay un tercer botón, “Reset Settings”, ojo con este, que os borra toda la configuración. Solo utiliazar en caso de fallo crítico para volver a cero todo.
Bueno, me dejo un botón, el de “Reset Z axis, … ” este si que una vez que hayáis hecho el calibrado de acelerometro lo podéis pulsar para afinar la posición.
Ajustando los Ports
Siguiente posición en la columna de la izquierda, debajo de setup.
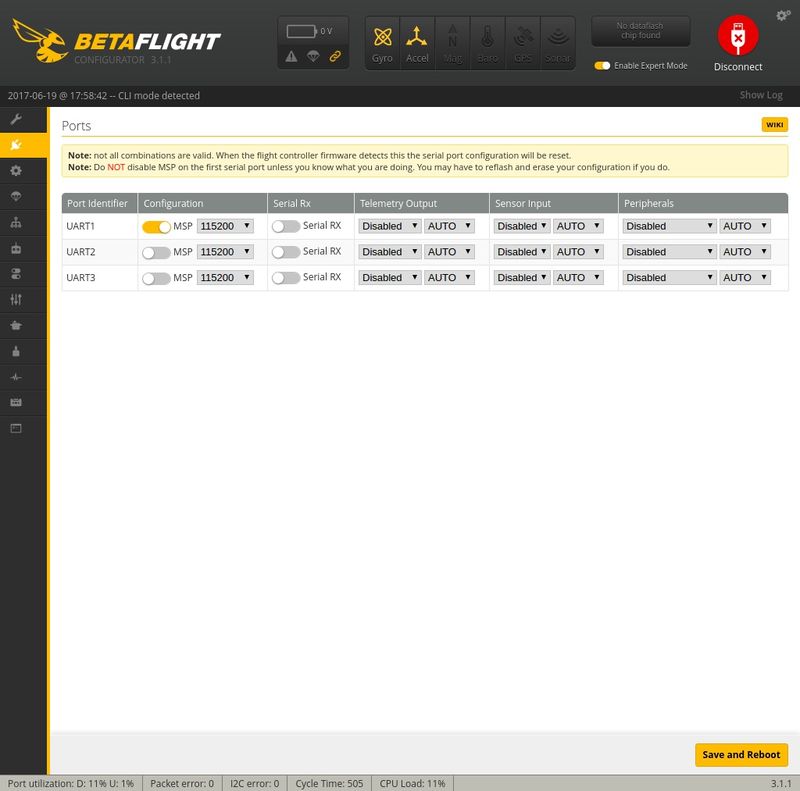
Ports Betaflight Q100
Configuration
Una posición más abajo de los ports.
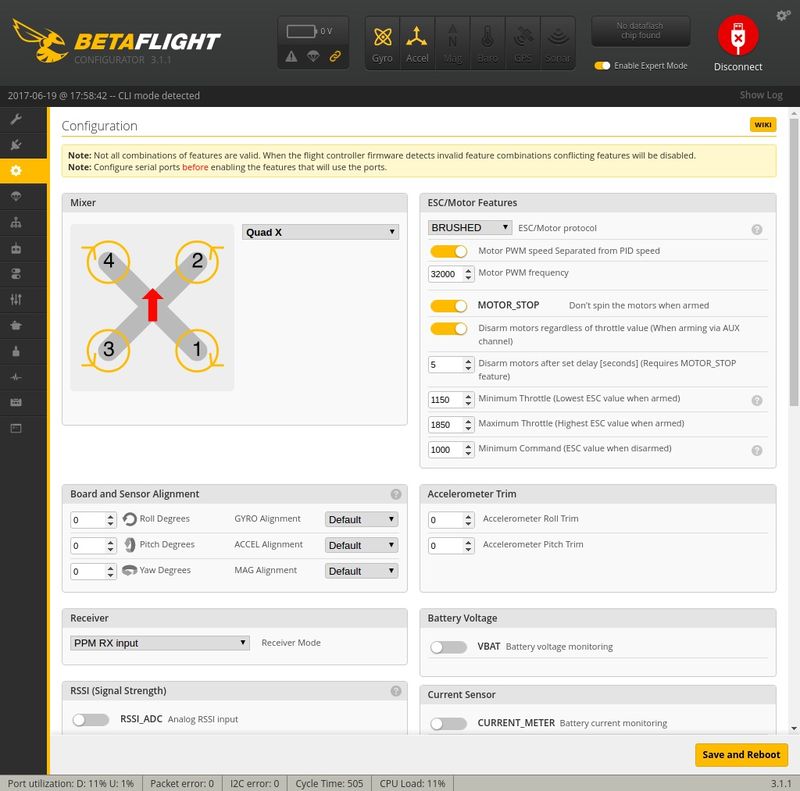
Ajustando Configuration Betaflight Q100
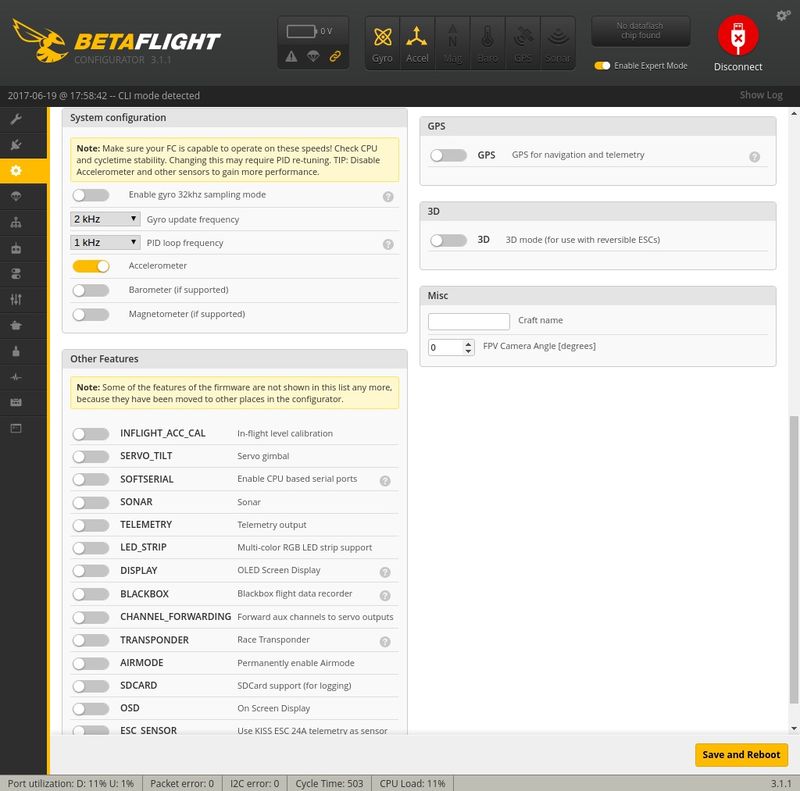
Ajustando Configuration 2 Betaflight Q100
Copiad los valores tal cual.
Failsafe
Ajustes por defecto.
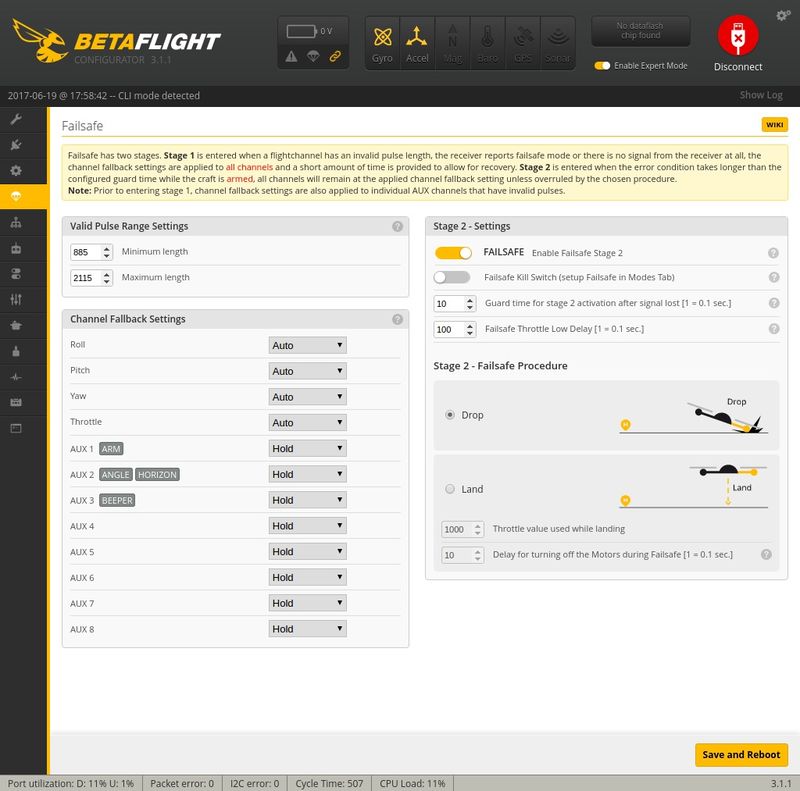
Failsafe Betaflight Q100
PID Tuning
Aquí está la madre del cordero, mis ajustes son estos, cada uno le dará su sabor, cosa de gustos…
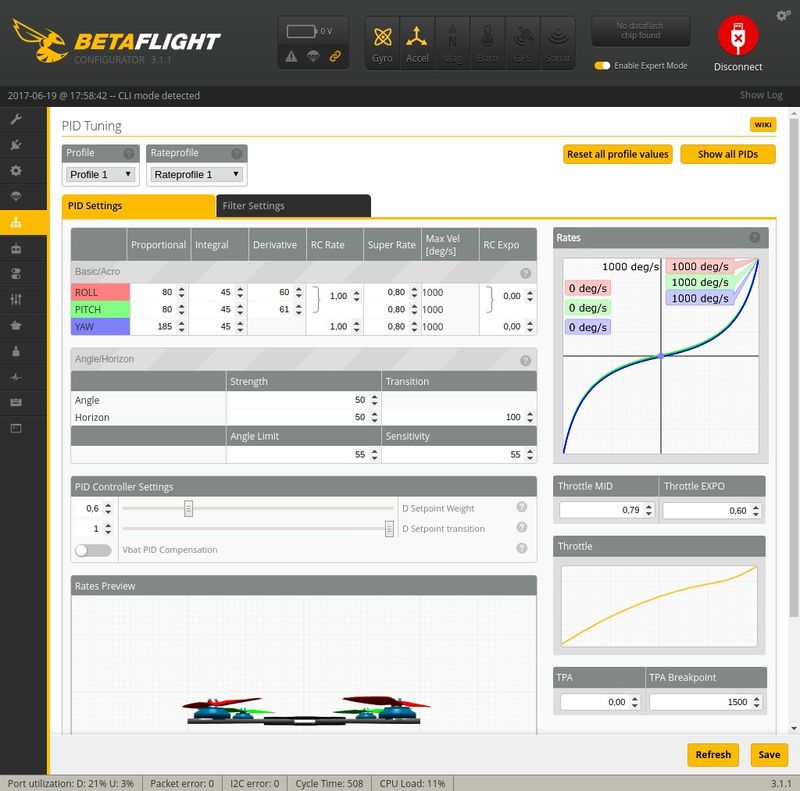
PID Tuning Betaflight Q100
Receiver
No es que en este apartado haya que hacer mucho, pero lo más probable es que os toque en “Channel Map” seleccionar la opción “Default” para que todo vaya bien y se bindee con la emisora. Es un detalle que a veces se nos pasa y nos volvemos locos porque no enlaza con la emisora, un simple “Default” lo arregla!!
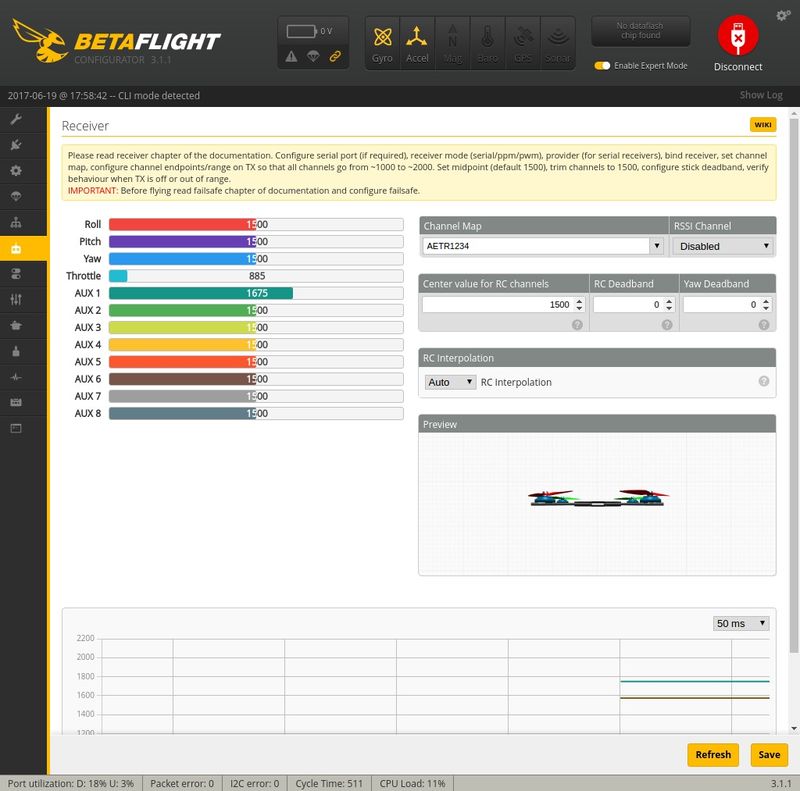
Receiver Betaflight Q100
Modes
Aquí también es cosa de gustos, mi sabor es este:
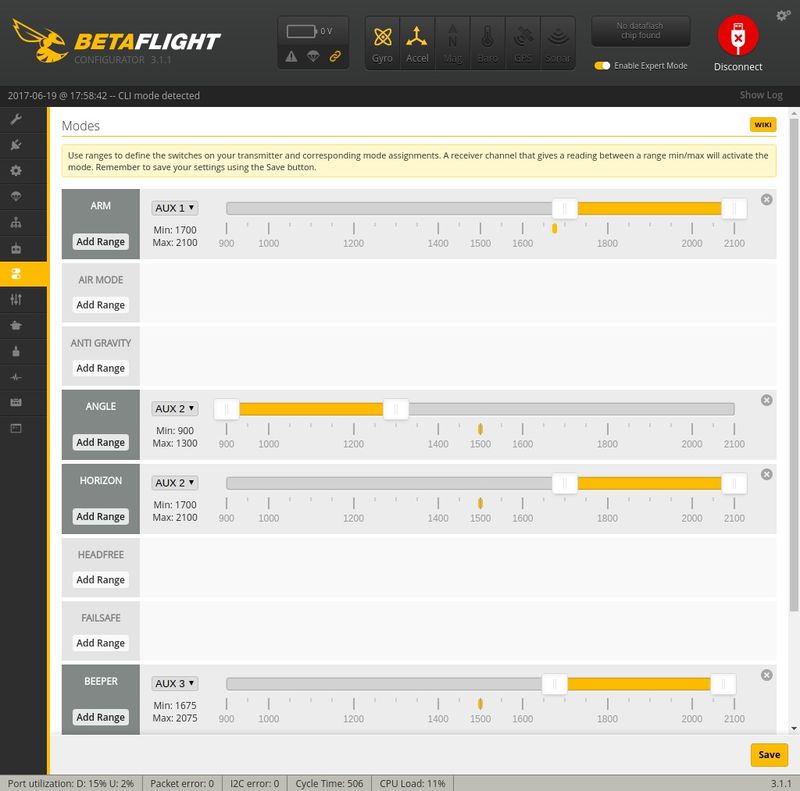
Modes Betaflight Q100
Pues prácticamente lo tenéis todo hecho. Los apartados que no he comentado ni tomado captura de pantalla es porque no hace falta hacer ninguna modificación en ellos.
Si os voy a enseñar la pantalla del “CLI”, la consola de comandos de Betaflight. Por aquí podemos hacer virguerias!!
De momento podeís hacer con el comando “dump” un volcado de la configuración, sencillamente seleccionando lo que os ha salido por pantalla con el ratón y copiandolo en un archivo de texto ya tendréis hecho un backup.
Si el proceso lo hacemos a la inversa, esto es, copiando en la linea “Write your command here” todos los datos volcados en el archivo de texto y pulsando “enter” habremos programado de un plumazo todos los valores en el kingkong Q100. Acordaos siempre que introduzcáis alguna modificación por el CLI de escribir el comando “save” al final de todo y pulsar el Enter para que lo grabe, si no a la que desconectéis la controladora del usb se os iran los datos.
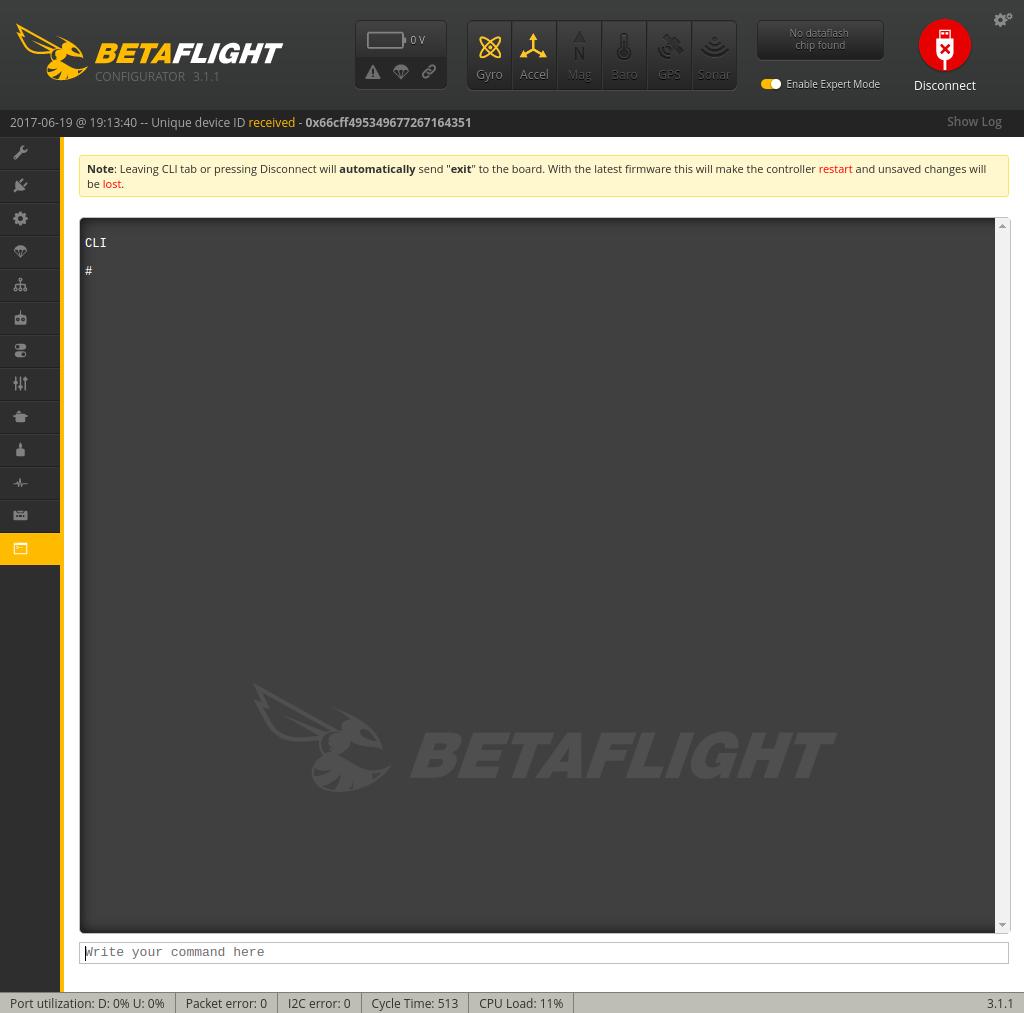
CLI Betaflight Q100
Archivos de configuración del Kingkong Q100
Utilizad la opción de “guardar enlace como” pulsando el botón derecho del ratón sobre los enlaces si los queréis descargar.
Pues espero que os haya gustado el artículo, que os haya ayudado en vuestra configuración, y que os haya servido para disfrutar de este maravilloso micro drone Kingkong Q100.
- Cómo solucionar pantalla negra en Windows 10 en un HP - Septiembre 13, 2017
- Cómo actualizar el firmware del Kingkong Q100 a Betaflight - Junio 19, 2017
- Alimentación PoE y SAI simple para AP - Junio 17, 2017
- Cómo montar una antena parabólica para un enlace P2P / PtP - Junio 14, 2017