


El Kingkong Q100 es una pequeña bestia, un micro drone FPV dotado de cuatro motores 8520, una controladora Naze32 F1, cámara de 600 líneas y transmisor fpv de 25 mw y 16 canales. Utiliza una batería 1S de 550 mAh 20C, aunque agradece mucho que sea de algo más de capacidad y si puede ser 35C o superior mejor aún.
El Q100 hay que ensamblarlo, cuando lo compras viene despiezado, por lo que tienes que tener algo de habilidad sobre todo porque tendrás que soldar cables, y de muy pequeño tamaño, todo es micro.
Frame
El frame del Q100 es muy robusto, aguanta muy bien las caídas (al principio es normal que le des más de una torta hasta que te haces con el, sobre todo hasta que lo afinas). Me gusta mucho su diseño, es divertido, práctico, y diferente.
Controladora
La controladora (tipo ALIENFLIGHT F1) va fijada al frame por unas pestañas y unos pequeños topecillos, recomiendo reforzar estos topes y pestañas con pegamento termofusible, el de pistola, porque con las caídas tiende a flexionar el frame del Q100 y se suelta la controladora, con la ayuda del refuerzo de la cola caliente evitarás que se fuercen esas pestañas y acaben rompiendo y a la vez que se suelte la controladora de vuelo.
Hélices
He de comentar que las hélices que acompaña de origen no me gustan, vienen muchas, pero tienden a soltarse incluso en vuelo porque parece que estén hechas para ejes de algo más de 1mm y no ajustan con suficiente fuerza. Mi recomendación, unas Walkera Lady Bird, algo más pequeñas (55mm frente a los 65mm de origen) pero muchísimo más firmes y resistentes. Luego hablaremos de como compensar esa disminución de tamaño de palas.
Firmware
Por defecto el Q100 viene con el firmware de Cleanflight, en versión 1.13 . Bueno, para empezar vale, pero recomendación encarecida que actualicéis a Betaflight 3.1.7 que una vez bien configurado es la noche y el día respecto al Cleanflight de origen, vamos que no tiene nada que ver, el Q100 se convierte en una máquina de combate. Más abajo encontrareis el dump de CLI con los valores, y unas tomas de las pantallas de configuración.
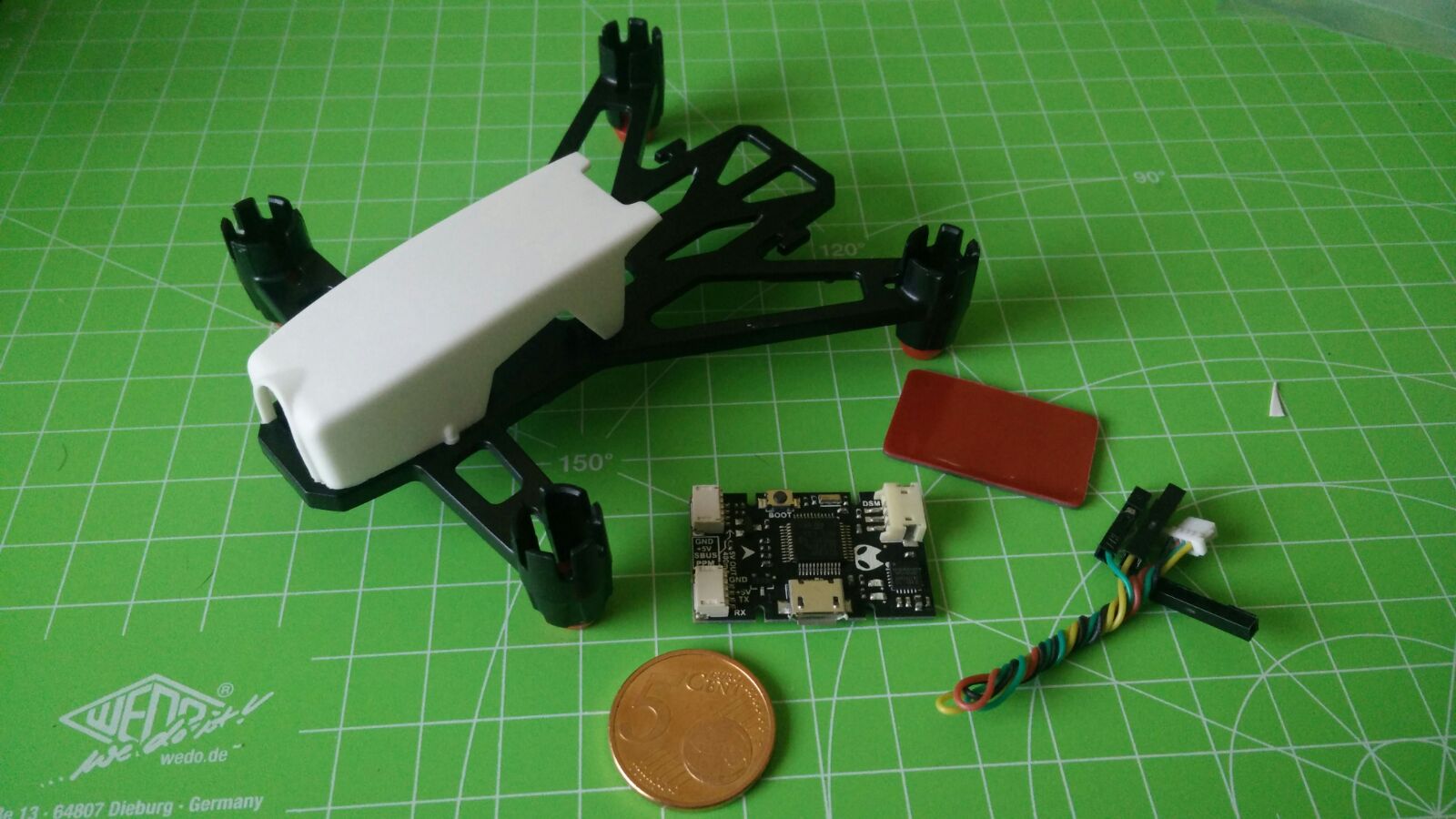
Como veis las piezas son realmente pequeñas, atención a la controladora de vuelo, diminuta.
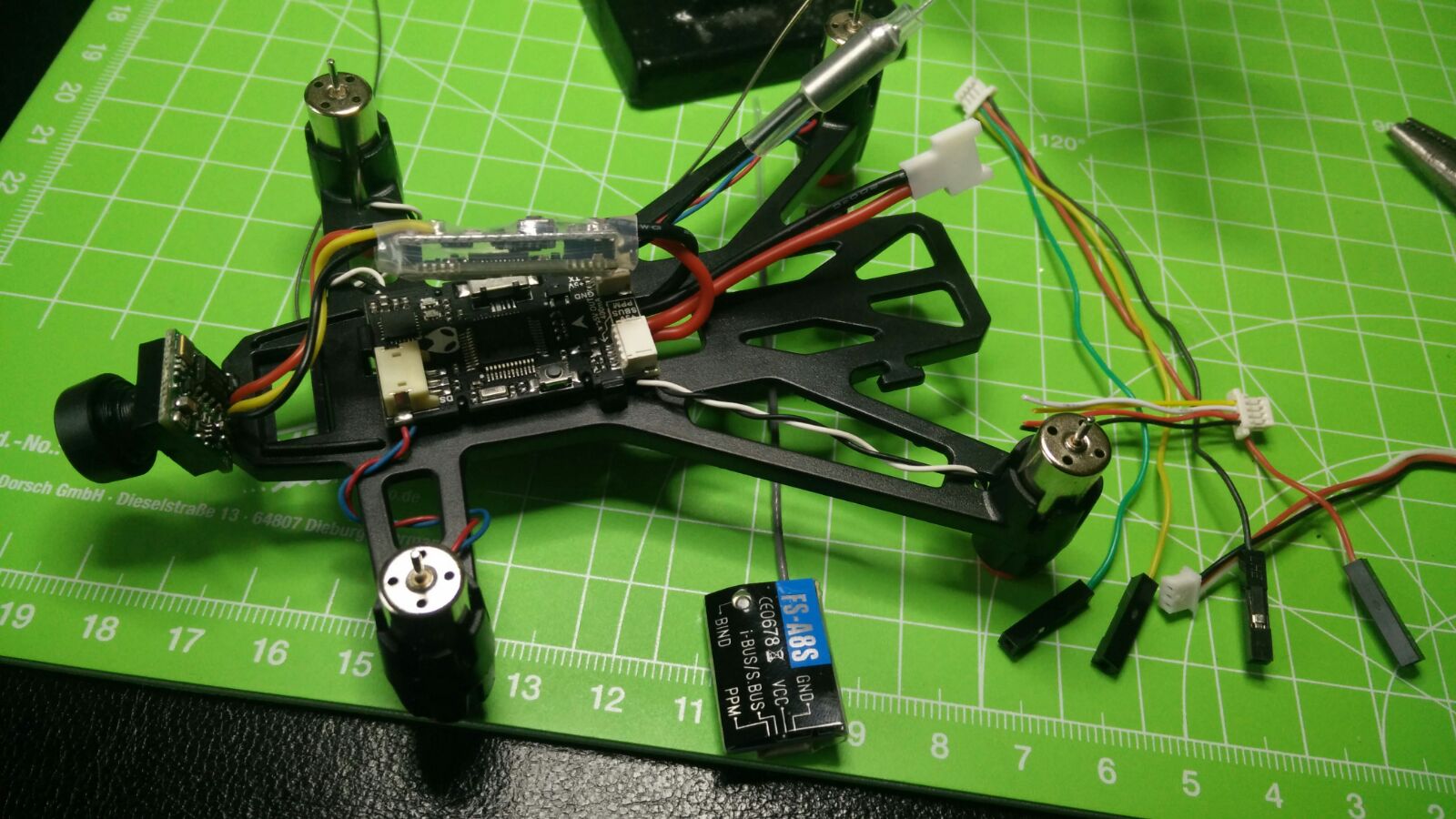
Ensamblando las piezas en el frame, detalle del receptor que usaré, un FlySky FS-A8S.

62,4gr. de peso contando batería.

Una imagen con hélices Walkera Lady Bird, y con las antenas tanto de recepcion 2.4 como de FPV en 5.8 en posición horizontal.

Unas últimas modificaciones en el Q100, podéis observar como le añadí conectores JST de 1,25 mm para poder sustituir los motores. tipo 8520 – Chaoli CL-820 .. sin necesidad de desoldar. Así mismo le añadí una cámara para grabación FHD de un Syma X5 modificada para uso autónomo.

El Q100 dotado con la cámara modificada del Syma X5 mirándose en un espejo.
Configuración
CLI
Y en primer lugar un volcado del CLI en Betaflight 3.1.7:
# dump # Betaflight / ALIENFLIGHTF1 3.1.7 Apr 3 2017 / 21:50:30 (e1c4b5c) name MOSQUITO Q100 resource BEEPER 1 A12 resource MOTOR 1 A08 resource MOTOR 2 A11 resource MOTOR 3 B06 resource MOTOR 4 B07 resource MOTOR 5 B08 resource MOTOR 6 B09 resource MOTOR 7 NONE resource MOTOR 8 NONE resource MOTOR 9 NONE resource MOTOR 10 NONE resource MOTOR 11 NONE resource MOTOR 12 NONE resource SERVO 1 NONE resource SERVO 2 NONE resource SERVO 3 NONE resource SERVO 4 NONE resource SERVO 5 NONE resource SERVO 6 NONE resource SERVO 7 NONE resource SERVO 8 NONE resource PPM 1 A00 resource PWM 1 A00 resource PWM 2 A01 resource PWM 3 A02 resource PWM 4 A03 resource PWM 5 A06 resource PWM 6 A07 resource PWM 7 B00 resource PWM 8 B01 resource LED_STRIP 1 A06 resource SERIAL_TX 1 NONE resource SERIAL_TX 2 NONE resource SERIAL_TX 3 B10 resource SERIAL_TX 4 NONE resource SERIAL_TX 5 NONE resource SERIAL_TX 6 NONE resource SERIAL_TX 7 NONE resource SERIAL_TX 8 NONE resource SERIAL_TX 9 NONE resource SERIAL_TX 10 NONE resource SERIAL_TX 11 NONE resource SERIAL_TX 12 NONE resource SERIAL_RX 1 NONE resource SERIAL_RX 2 NONE resource SERIAL_RX 3 B11 resource SERIAL_RX 4 NONE resource SERIAL_RX 5 NONE resource SERIAL_RX 6 NONE resource SERIAL_RX 7 NONE resource SERIAL_RX 8 NONE resource SERIAL_RX 9 NONE resource SERIAL_RX 10 NONE resource SERIAL_RX 11 NONE resource SERIAL_RX 12 NONE mixer QUADX mmix reset mmix 0 1.000 -0.414 1.000 -1.000 mmix 1 1.000 -0.414 -1.000 1.000 mmix 2 1.000 0.414 1.000 1.000 mmix 3 1.000 0.414 -1.000 -1.000 mmix 4 1.000 -1.000 -0.414 -1.000 mmix 5 1.000 1.000 -0.414 1.000 mmix 6 1.000 -1.000 0.414 1.000 mmix 7 1.000 1.000 0.414 -1.000 servo 0 1000 2000 1500 90 90 100 -1 servo 1 1000 2000 1500 90 90 100 -1 servo 2 1000 2000 1500 90 90 100 -1 servo 3 1000 2000 1500 90 90 100 -1 servo 4 1000 2000 1500 90 90 100 -1 servo 5 1000 2000 1500 90 90 100 -1 servo 6 1000 2000 1500 90 90 100 -1 servo 7 1000 2000 1500 90 90 100 -1 smix reset feature -RX_PPM feature -VBAT feature -INFLIGHT_ACC_CAL feature -RX_SERIAL feature -MOTOR_STOP feature -SERVO_TILT feature -SOFTSERIAL feature -GPS feature -FAILSAFE feature -SONAR feature -TELEMETRY feature -CURRENT_METER feature -3D feature -RX_PARALLEL_PWM feature -RX_MSP feature -RSSI_ADC feature -LED_STRIP feature -DISPLAY feature -OSD feature -BLACKBOX feature -CHANNEL_FORWARDING feature -TRANSPONDER feature -AIRMODE feature -SDCARD feature -VTX feature -RX_SPI feature -SOFTSPI feature -ESC_SENSOR feature -FEATURE_ANTI_GRAVITY feature RX_PPM feature MOTOR_STOP feature FAILSAFE beeper GYRO_CALIBRATED beeper RX_LOST beeper RX_LOST_LANDING beeper DISARMING beeper ARMING beeper ARMING_GPS_FIX beeper BAT_CRIT_LOW beeper BAT_LOW beeper GPS_STATUS beeper RX_SET beeper ACC_CALIBRATION beeper ACC_CALIBRATION_FAIL beeper READY_BEEP beeper MULTI_BEEPS beeper DISARM_REPEAT beeper ARMED beeper SYSTEM_INIT beeper ON_USB map AETR1234 serial 0 1 115200 57600 0 115200 serial 1 0 115200 57600 0 115200 serial 2 0 115200 57600 0 115200 led 0 0,0::C:0 led 1 0,0::C:0 led 2 0,0::C:0 led 3 0,0::C:0 led 4 0,0::C:0 led 5 0,0::C:0 led 6 0,0::C:0 led 7 0,0::C:0 led 8 0,0::C:0 led 9 0,0::C:0 led 10 0,0::C:0 led 11 0,0::C:0 led 12 0,0::C:0 led 13 0,0::C:0 led 14 0,0::C:0 led 15 0,0::C:0 led 16 0,0::C:0 led 17 0,0::C:0 led 18 0,0::C:0 led 19 0,0::C:0 led 20 0,0::C:0 led 21 0,0::C:0 led 22 0,0::C:0 led 23 0,0::C:0 led 24 0,0::C:0 led 25 0,0::C:0 led 26 0,0::C:0 led 27 0,0::C:0 led 28 0,0::C:0 led 29 0,0::C:0 led 30 0,0::C:0 led 31 0,0::C:0 color 0 0,0,0 color 1 0,255,255 color 2 0,0,255 color 3 30,0,255 color 4 60,0,255 color 5 90,0,255 color 6 120,0,255 color 7 150,0,255 color 8 180,0,255 color 9 210,0,255 color 10 240,0,255 color 11 270,0,255 color 12 300,0,255 color 13 330,0,255 color 14 0,0,0 color 15 0,0,0 mode_color 0 0 1 mode_color 0 1 11 mode_color 0 2 2 mode_color 0 3 13 mode_color 0 4 10 mode_color 0 5 3 mode_color 1 0 5 mode_color 1 1 11 mode_color 1 2 3 mode_color 1 3 13 mode_color 1 4 10 mode_color 1 5 3 mode_color 2 0 10 mode_color 2 1 11 mode_color 2 2 4 mode_color 2 3 13 mode_color 2 4 10 mode_color 2 5 3 mode_color 3 0 8 mode_color 3 1 11 mode_color 3 2 4 mode_color 3 3 13 mode_color 3 4 10 mode_color 3 5 3 mode_color 4 0 7 mode_color 4 1 11 mode_color 4 2 3 mode_color 4 3 13 mode_color 4 4 10 mode_color 4 5 3 mode_color 5 0 9 mode_color 5 1 11 mode_color 5 2 2 mode_color 5 3 13 mode_color 5 4 10 mode_color 5 5 3 mode_color 6 0 6 mode_color 6 1 10 mode_color 6 2 1 mode_color 6 3 0 mode_color 6 4 0 mode_color 6 5 2 mode_color 6 6 3 mode_color 6 7 6 mode_color 6 8 0 mode_color 6 9 0 mode_color 6 10 0 mode_color 7 0 3 aux 0 0 0 1700 2100 aux 1 28 2 1700 2100 aux 2 1 1 900 1300 aux 3 2 1 1700 2100 aux 4 0 0 900 900 aux 5 0 0 900 900 aux 6 0 0 900 900 aux 7 0 0 900 900 aux 8 0 0 900 900 aux 9 0 0 900 900 aux 10 0 0 900 900 aux 11 0 0 900 900 aux 12 0 0 900 900 aux 13 0 0 900 900 aux 14 0 0 900 900 aux 15 0 0 900 900 aux 16 0 0 900 900 aux 17 0 0 900 900 aux 18 0 0 900 900 aux 19 0 0 900 900 adjrange 0 0 0 900 900 0 0 adjrange 1 0 0 900 900 0 0 adjrange 2 0 0 900 900 0 0 adjrange 3 0 0 900 900 0 0 adjrange 4 0 0 900 900 0 0 adjrange 5 0 0 900 900 0 0 adjrange 6 0 0 900 900 0 0 adjrange 7 0 0 900 900 0 0 adjrange 8 0 0 900 900 0 0 adjrange 9 0 0 900 900 0 0 adjrange 10 0 0 900 900 0 0 adjrange 11 0 0 900 900 0 0 adjrange 12 0 0 900 900 0 0 adjrange 13 0 0 900 900 0 0 adjrange 14 0 0 900 900 0 0 rxrange 0 1000 2000 rxrange 1 1000 2000 rxrange 2 1000 2000 rxrange 3 1000 2000 rxfail 0 a rxfail 1 a rxfail 2 a rxfail 3 a rxfail 4 h rxfail 5 h rxfail 6 h rxfail 7 h rxfail 8 h rxfail 9 h rxfail 10 h rxfail 11 h rxfail 12 h rxfail 13 h rxfail 14 h rxfail 15 h rxfail 16 h rxfail 17 h set task_statistics = ON set mid_rc = 1500 set min_check = 1100 set max_check = 1900 set rssi_channel = 0 set rssi_scale = 30 set rc_interp = AUTO set rc_interp_ch = RP set rc_interp_int = 19 set rssi_invert = OFF set input_filtering_mode = OFF set fpv_mix_degrees = 0 set max_aux_channels = 6 set debug_mode = NONE set min_throttle = 1150 set max_throttle = 1850 set min_command = 1000 set 3d_deadband_low = 1406 set 3d_deadband_high = 1514 set 3d_neutral = 1460 set 3d_deadband_throttle = 50 set use_unsynced_pwm = ON set motor_pwm_protocol = BRUSHED set motor_pwm_rate = 32000 set disarm_kill_switch = ON set gyro_cal_on_first_arm = OFF set auto_disarm_delay = 5 set small_angle = 25 set fixedwing_althold_dir = 1 set reboot_character = 82 set serial_update_rate_hz = 100 set beeper_inversion = OFF set beeper_od = ON set serialrx_provider = SPEK1024 set sbus_inversion = ON set spektrum_sat_bind = 5 set spektrum_sat_bind_autorst = 1 set tlm_switch = OFF set tlm_inversion = ON set sport_halfduplex = ON set frsky_default_lat = 0.000 set frsky_default_long = 0.000 set frsky_gps_format = 0 set frsky_unit = IMPERIAL set frsky_vfas_precision = 0 set frsky_vfas_cell_voltage = OFF set hott_alarm_int = 5 set pid_in_tlm = OFF set bat_capacity = 0 set vbat_scale = 110 set vbat_max_cell_voltage = 43 set vbat_min_cell_voltage = 31 set vbat_warning_cell_voltage = 35 set vbat_hysteresis = 1 set ibat_scale = 400 set ibat_offset = 0 set mwii_ibat_output = OFF set current_meter_type = ADC set battery_meter_type = ADC set bat_detect_thresh = 55 set use_vbat_alerts = ON set use_cbat_alerts = OFF set cbat_alert_percent = 10 set align_gyro = DEFAULT set align_acc = DEFAULT set align_mag = DEFAULT set align_board_roll = 0 set align_board_pitch = 0 set align_board_yaw = 0 set gyro_lpf = OFF set gyro_sync_denom = 8 set gyro_use_32khz = OFF set gyro_lowpass_type = PT1 set gyro_lowpass = 90 set gyro_notch1_hz = 400 set gyro_notch1_cut = 300 set gyro_notch2_hz = 200 set gyro_notch2_cut = 100 set moron_threshold = 48 set imu_dcm_kp = 2500 set imu_dcm_ki = 0 set alt_hold_deadband = 40 set alt_hold_fast_change = ON set deadband = 0 set yaw_deadband = 0 set thr_corr_value = 0 set thr_corr_angle = 800 set yaw_control_direction = 1 set yaw_motor_direction = 1 set servo_center_pulse = 1500 set tri_unarmed_servo = ON set servo_lowpass_hz = 400 set servo_lowpass = OFF set servo_pwm_rate = 50 set gimbal_mode = NORMAL set channel_forwarding_start = 4 set airmode_start_throttle = 1350 set failsafe_delay = 10 set failsafe_off_delay = 10 set failsafe_throttle = 1200 set failsafe_kill_switch = OFF set failsafe_throttle_low_delay = 100 set failsafe_procedure = AUTO-LAND set rx_min_usec = 885 set rx_max_usec = 2115 set acc_hardware = AUTO set acc_lpf_hz = 10 set accxy_deadband = 40 set accz_deadband = 40 set acc_unarmedcal = ON set acc_trim_pitch = 0 set acc_trim_roll = 0 set pid_process_denom = 1 set blackbox_rate_num = 1 set blackbox_rate_denom = 1 set blackbox_device = SERIAL set blackbox_on_motor_test = OFF set ledstrip_visual_beeper = OFF profile 0 set pidsum_limit = 0.500 set pidsum_limit_yaw = 0.500 set d_lowpass_type = PT1 set d_lowpass = 100 set d_notch_hz = 260 set d_notch_cut = 160 set vbat_pid_gain = OFF set pid_at_min_throttle = ON set anti_gravity_thresh = 350 set anti_gravity_gain = 1.000 set setpoint_relax_ratio = 30 set d_setpoint_weight = 100 set yaw_accel_limit = 10.000 set accel_limit = 0.000 set iterm_windup = 50 set yaw_lowpass = 0 set p_pitch = 80 set i_pitch = 45 set d_pitch = 61 set p_roll = 80 set i_roll = 45 set d_roll = 60 set p_yaw = 185 set i_yaw = 45 set d_yaw = 20 set p_alt = 50 set i_alt = 0 set d_alt = 0 set p_level = 50 set i_level = 50 set d_level = 100 set p_vel = 55 set i_vel = 55 set d_vel = 75 set level_sensitivity = 55 set level_limit = 55 rateprofile 0 rateprofile 0 set rc_rate = 100 set rc_rate_yaw = 100 set rc_expo = 0 set rc_yaw_expo = 0 set thr_mid = 80 set thr_expo = 62 set roll_srate = 80 set pitch_srate = 80 set yaw_srate = 80 set tpa_rate = 0 set tpa_breakpoint = 1500 #
Y en segundo lugar unas capturas de pantalla de las configuraciones en Betaflight:
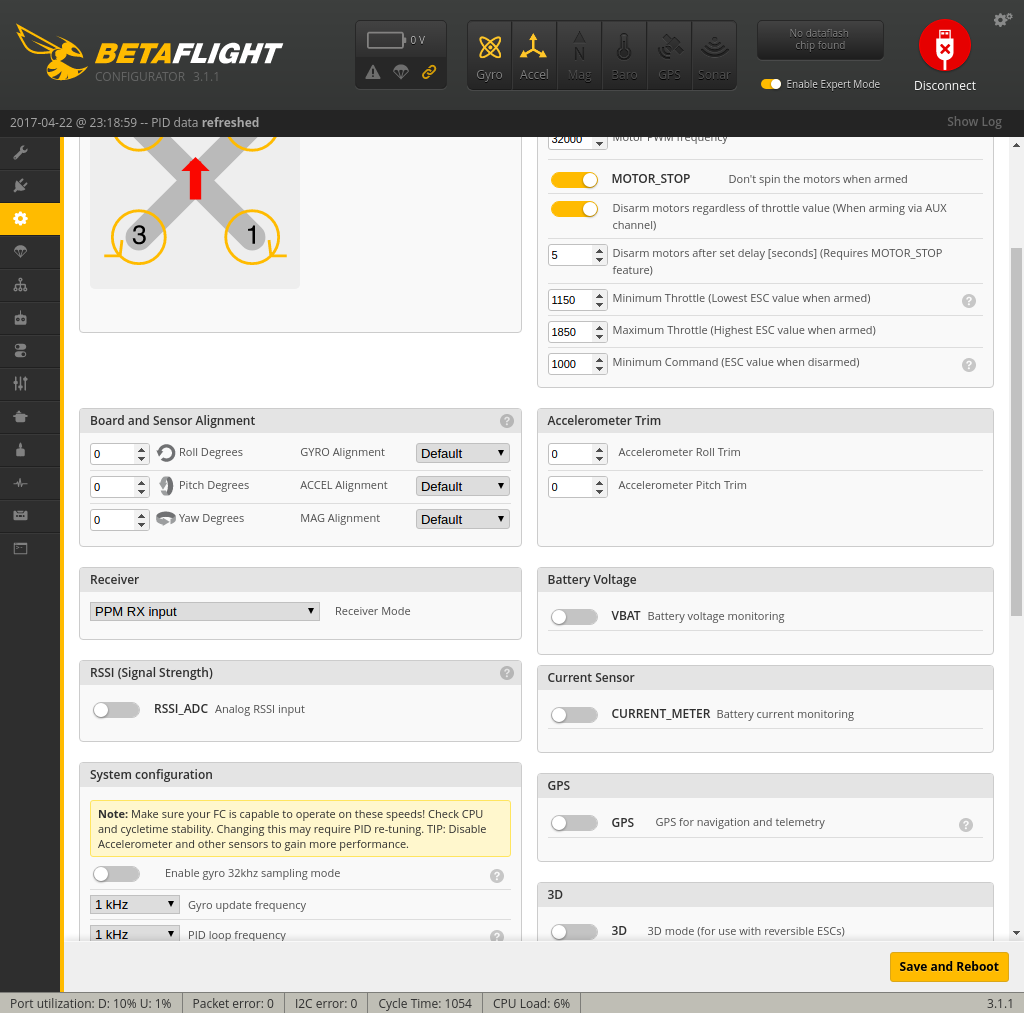
Pantallazo del panel de configuración en Betaflight. El Gyro se puede poner en 2 kHz sin problemas y el PID a 1 kHz con lo que tendremos en una F1 un valor de unos 500 ciclos totalmente fiable. Nunca una F1 ha corrido tanto!!
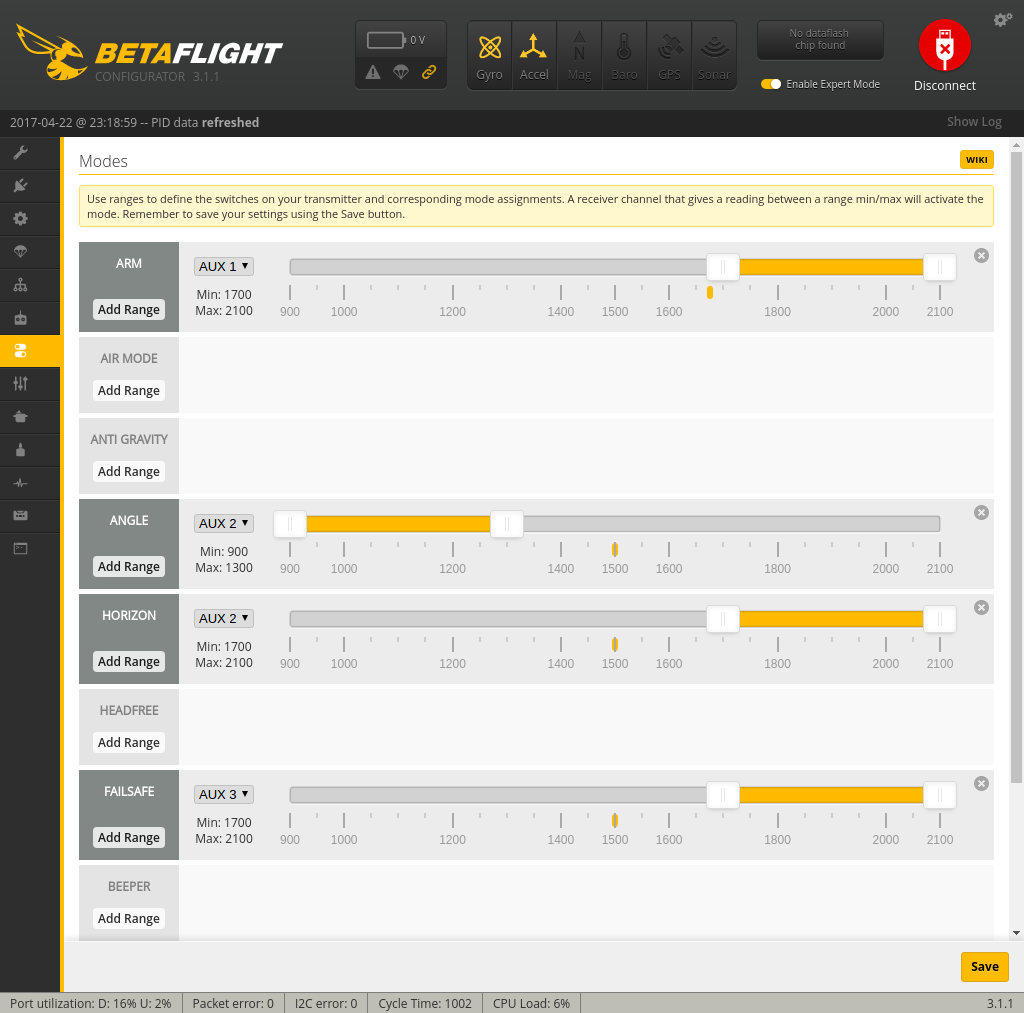
Pantallazo de los modes, esto es muy personal.
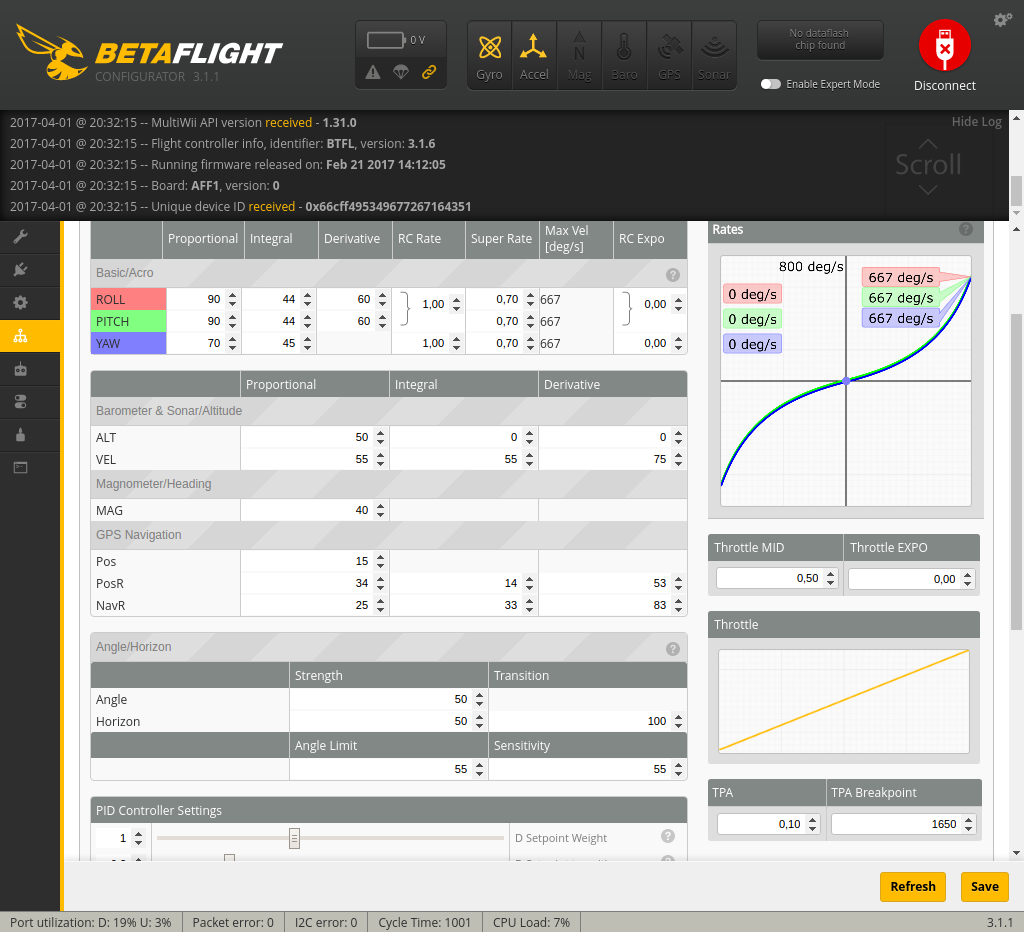
Pantallazo de los valores de los PIDs que viene por defecto para la Alienflight F1
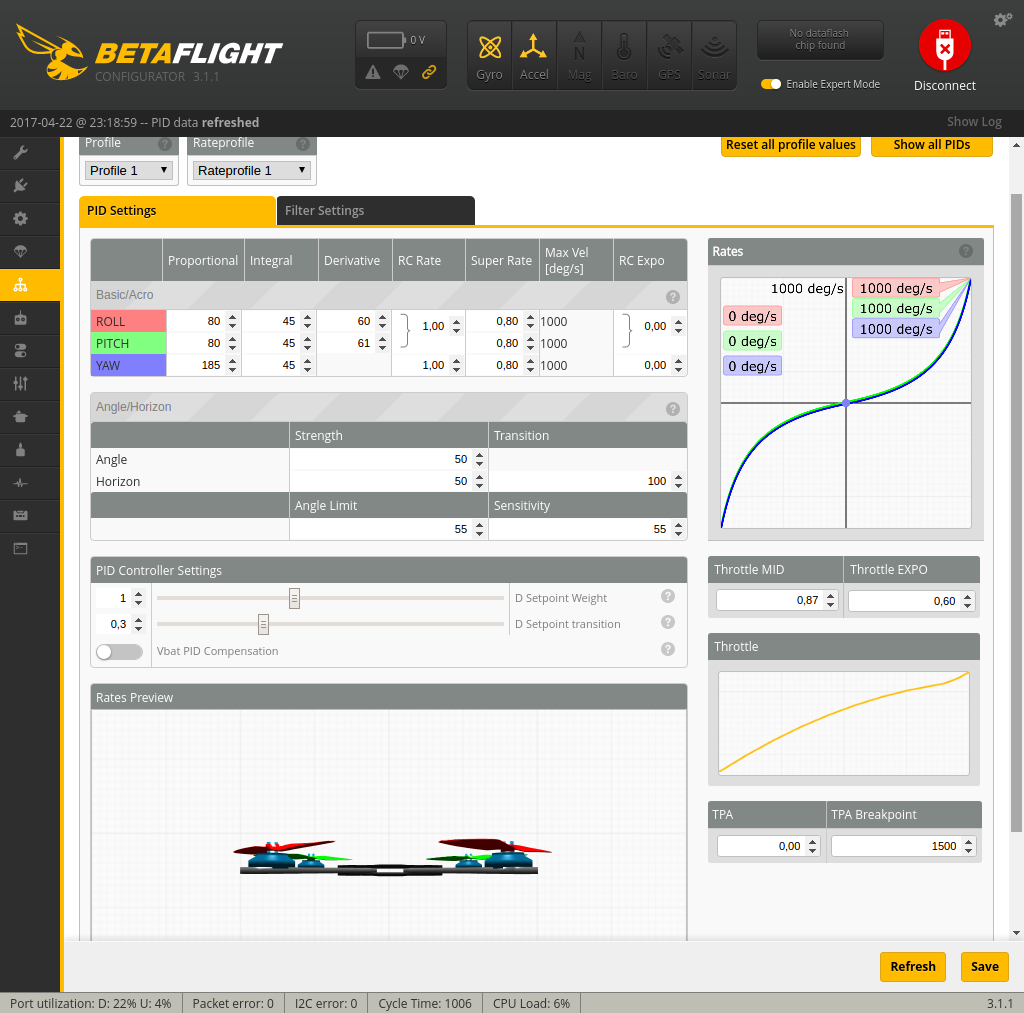
Pantallazo de los PIDs para la Alienflight F1 a mi gusto, contando que aquí no aparecen las curvas del Roll, Pitch y Yaw porque las hago en la emisora.
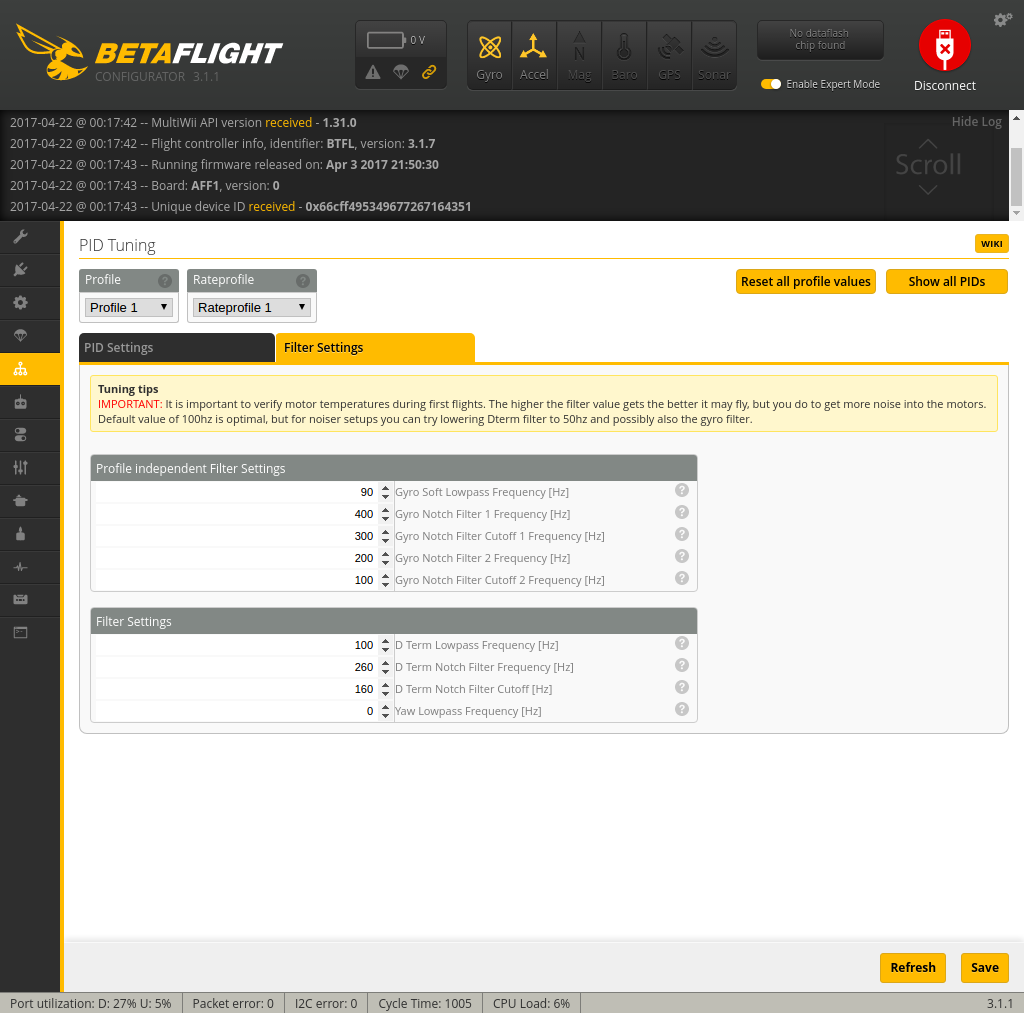
Esta segunda pestaña de los PIDs es muy interesante, aquí podremos desactivar los filtros notch.
Por lo tanto el tema de los notch filters es básico para un ajuste fino de verdad. Podéis probar primero desactivando el “Gyro Notch Filter 1..” poniendo el valor en “0” y por CLI introducir los comandos :
set d_lowpass_type = PT1
save
De esta manera liberamos carga de cálculos a la cpu y conseguimos además mucha más velocidad a la hora de interpretar los valores del Gyro. Esto por lo tento hará que estabilice mucho más rápido. Pero también puede ocurrir que los motores se calienten un poco más por estar sujetos a modificaciones de velocidad más frecuentes.
Unos vídeos de vuelo con configuración de origen Cleanflight, y con demasiado viento para esa configuración… algo que mejora abismalmente con Betaflight.
Artículos recomendados:
Cómo actualizar el firmware del Kingkong Q100 a Betaflight
No os perdáis esta guía de actualización y configuración Betaflight para el Kingkong Q100 !!
- Cómo solucionar pantalla negra en Windows 10 en un HP - Septiembre 13, 2017
- Cómo actualizar el firmware del Kingkong Q100 a Betaflight - Junio 19, 2017
- Alimentación PoE y SAI simple para AP - Junio 17, 2017
- Cómo montar una antena parabólica para un enlace P2P / PtP - Junio 14, 2017